
يمكن استخدام رادار حركة سطح المطار لمساعدة المتحكمين في معرفة الموقع في الوقت الفعلي وحركة الطائرات والمركبات الثابتة والمتحركة ، وإصدار التعليمات لتجنب الازدحام المروري وتعارض الطائرات / المركبات في التقاطع ، واختيار مسار مناسب للطائرات ، وتحديد ما إذا كان المدرج مشغولاً ؛ ولتوفير معلومات ملاحية للمركبة ومركبات الإنقاذ في حالة الطوارئ.
تم تشغيل LW-R5-CJ-1 تجريبيًا لمدة 5 سنوات في مطار XinQiao في Hefei، وحصل على أول ترخيص مؤقت لرادار الحركة السطحية لمعدات الطيران المدني الصيني في أبريل 2017. ونرحب بك للتحقق من معداتنا في أي وقت.
ميزات تقنية:
1.هوائي نموذج مربع التمام العكسي يضمن الكشف الفعال في منطقة سطح المطار مع برج النظام على ارتفاعات مختلفة (15 م 110 م).
2.مرسل الحالة الصلبة الكامل مع سهولة التركيب والصيانة ، وانخفاض تكاليف دورة الحياة.
3- يضمن جهاز الاستقبال الديناميكي الكبير أن جميع الأهداف داخل المطار لديها نطاق كامل من المراقبة الفعالة.
4- تم اعتماد تنوع التردد وخفة الحركة لتقليل وميض الأهداف وتحسين احتمالية الكشف ودقة الكشف.
5. ارتفاع معدل البيانات. الحد الأدنى لسرعة الهوائي 60 لفة / دقيقة مطلوب لتحديث المعلومات في ثوانٍ.
6 يتم تحقيق قدرات تحديد الهدف والدقة العالية والدقة العالية في تحديد المواقع. تم اعتماد تقنية التصوير بالفتحة الحقيقية لمعالجة التصوير على الأهداف. يتم استخدام إشارة عرض نطاق كبير وهوائي كبير الحجم لتحقيق استبانة عالية للمدى والسمت.
7- تم تحقيق الأمان العالي والموثوقية العالية والقدرة القوية على التكيف مع البيئة لدعم العمليات على مدار اليوم. لذلك فهي وسيلة مهمة لمراقبة عمليات المطار في حالات الرؤية المنخفضة.

الشكل 1 برج هوائي BWSMR في مطار Xinqiao |
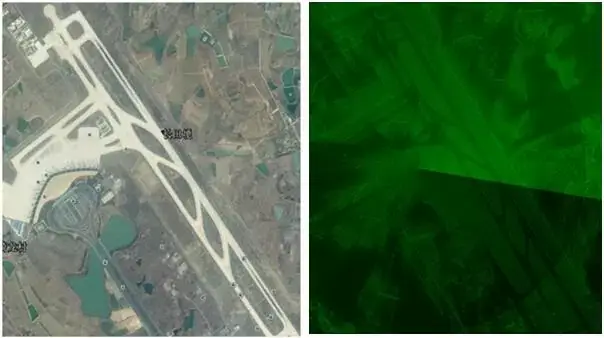
الشكل 2 الشكل 2 BWSMR التصوير الفتحة الحقيقية وصورة كوم |
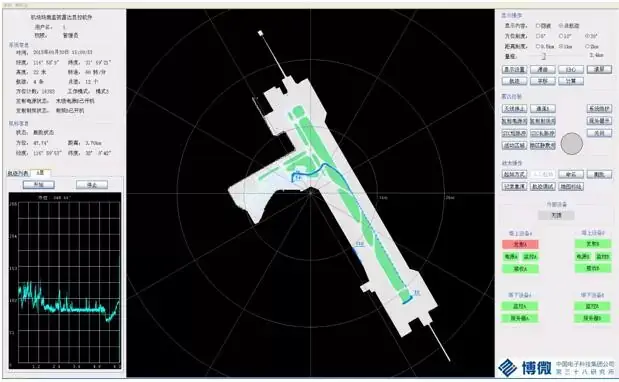
الشكل 3 واجهة عرض صيانة الجهاز المحلي BWSMR ملاحظة: في الشاشة في الشكل 3 ، T4 هي المركبة الإرشادية ، T3 هي طائرة الهبوط ، T2 هي الطائرة التي تنتظر الإقلاع ، و T10 هي السيارة التي تسير على الطريق الدائري. |
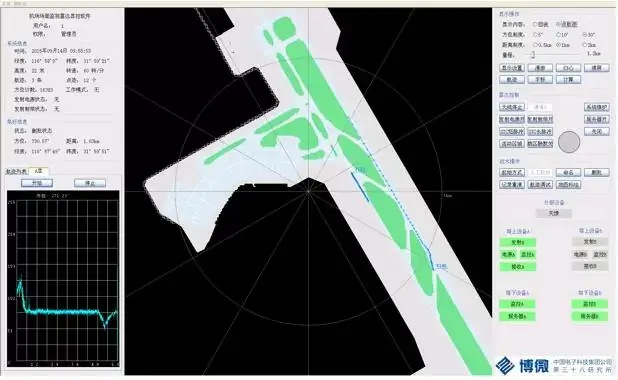
الشكل 4 مقارنة الصدى الأصلي (أعلاه) والعرض من نقطة إلى مسار (أدناه) لاكتشاف هدف BWSMR وتأثير العرض ملاحظة: في الشكل 4 ، T106 و T112 هي طائرات هبوط. تُظهر الصورة أعلاه نتيجة عرض الصدى الأصلية ، وتُظهر الصورة التالية نتيجة عرض المسار. مقارنة على خريطة Google Earth |
معلمة الأداء الرئيسية
| بنية النظام: | التكرار المزدوج (باستثناء الهوائي ونظام التحكم المؤازر) |
| نطاق الترددات: | كو باند |
| نطاق الكشف (Pd = 0.9 ، Pfa = 10-6 ، σ = 2m2 ، فئة أهداف SW-I): | |
| يتراوح: | 150 م ~ 5500 م (مشمس) 150 م ~ 3600 م (16 مم / ساعة مطر) |
| ارتفاع: | 200 م |
| السمت: | 360 درجة |
| دقة: | |
| يتراوح: | 7.5 م |
| السمت: | 0.25 درجة |
| دقة تحديد الموقع: | 3 م (موقع 1000 متر من الرادار) |
| كسب الهوائي: | ≥37.3 ديسيبل (مركز الشعاع) |
| نوع المرسل: | جهاز إرسال كامل الحالة |
| قوة ذروة الانبعاث: | ≥140 واط |
| سرعة دوران الهوائي: | 60 راد / دقيقة |
| القدرة على معالجة الهدف: | 5000 نقطة / ثانية |
| وضع نقل البيانات: | شبكة إيثرنت |
| تنسيق بيانات الإخراج : | أستريكس CAT240 ، أستريكس CAT010 |
| مصداقية: | MTBCF≥28000h ، MTTR≤0.5h |
| التوفر : | ≥0.9999 |